Жабко А.П. Сборник задачи и упражнений по теории управления:
стабилизация программных движений: Учебное пособие / А.П. Жабко,
А.В. Прасолов, В.Л. Харитонов. Москва: Высшая школа, 2003.
№ 65.
Для управляемой системы
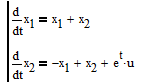 (1)
(1)
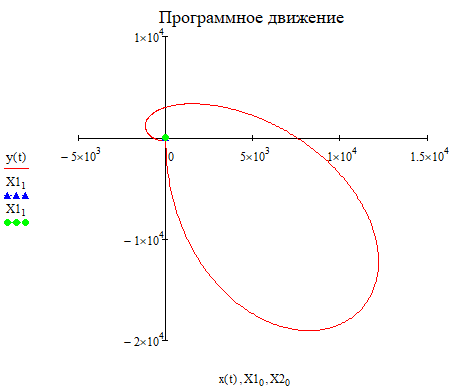
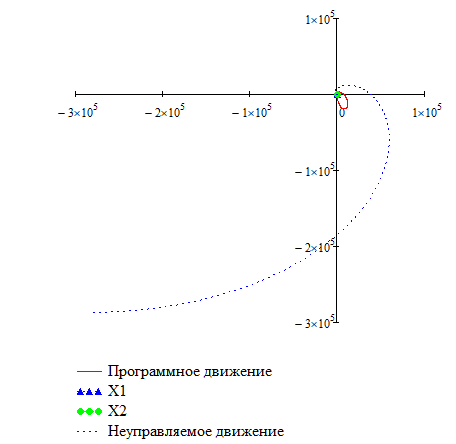
построить программное управление для перевода системы из состояния
 в состояние
в состояние  на промежутке времени [0,4π]
на промежутке времени [0,4π]
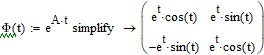
Фундаментальная матрица системы  :
:
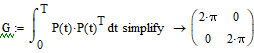
Так как  , то пара
, то пара  управляема на промежутке [0,4π].
управляема на промежутке [0,4π].
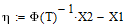
Построим программное управление в виде  , где С - постоянный вектор,
, где С - постоянный вектор,
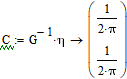
подлежащий определению. Вектор C является решением уравнения  , где:
, где:
и программное управление:
Определим программное движение, как решение задачи Коши для системы (1) с начальным условием  :
: