Управляемость линейной системы
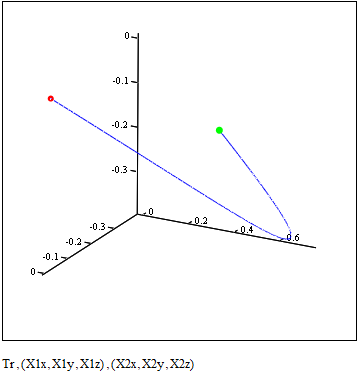
Задача. Построить программное управление U(t), с помощью которого система (1) из состояния X1 будет переведена в состояние X2 на промежутке времени [0,T]
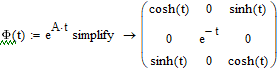
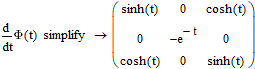
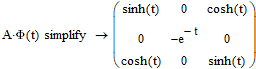
I. Построение фундаментальной матрицы Φ(t)
Cтолбцы матрицы - линейно-независимые решения соответствующей однородной системы 
Критерий полной управляемости.
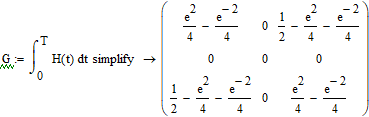
Для того чтобы система (1) была полностью управляема на отрезке [0,T], необходимо и достаточно, чтобы матрица  была невырожденной, т.е.
была невырожденной, т.е.
Замечание. Так как матрицы A и B являются постоянными, то для исследование на полную управляемость можно было воспользоваться критерием Калмана: система (1) полностью управляема тогда и только тогда, когда ранг блочной матрицы
Пара точек <X1, X2> является управляемой на [0, T], если существует управление  , которое является решением уравнения:
, которое является решением уравнения:
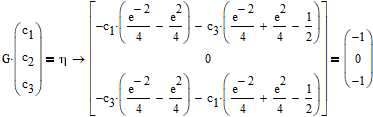
Критерий управляемости пары точек. Для того чтобы пара точек  и
и  была управляемой на отрезке [0, T], необходимо и достаточно, чтобы
была управляемой на отрезке [0, T], необходимо и достаточно, чтобы 



























 :
: